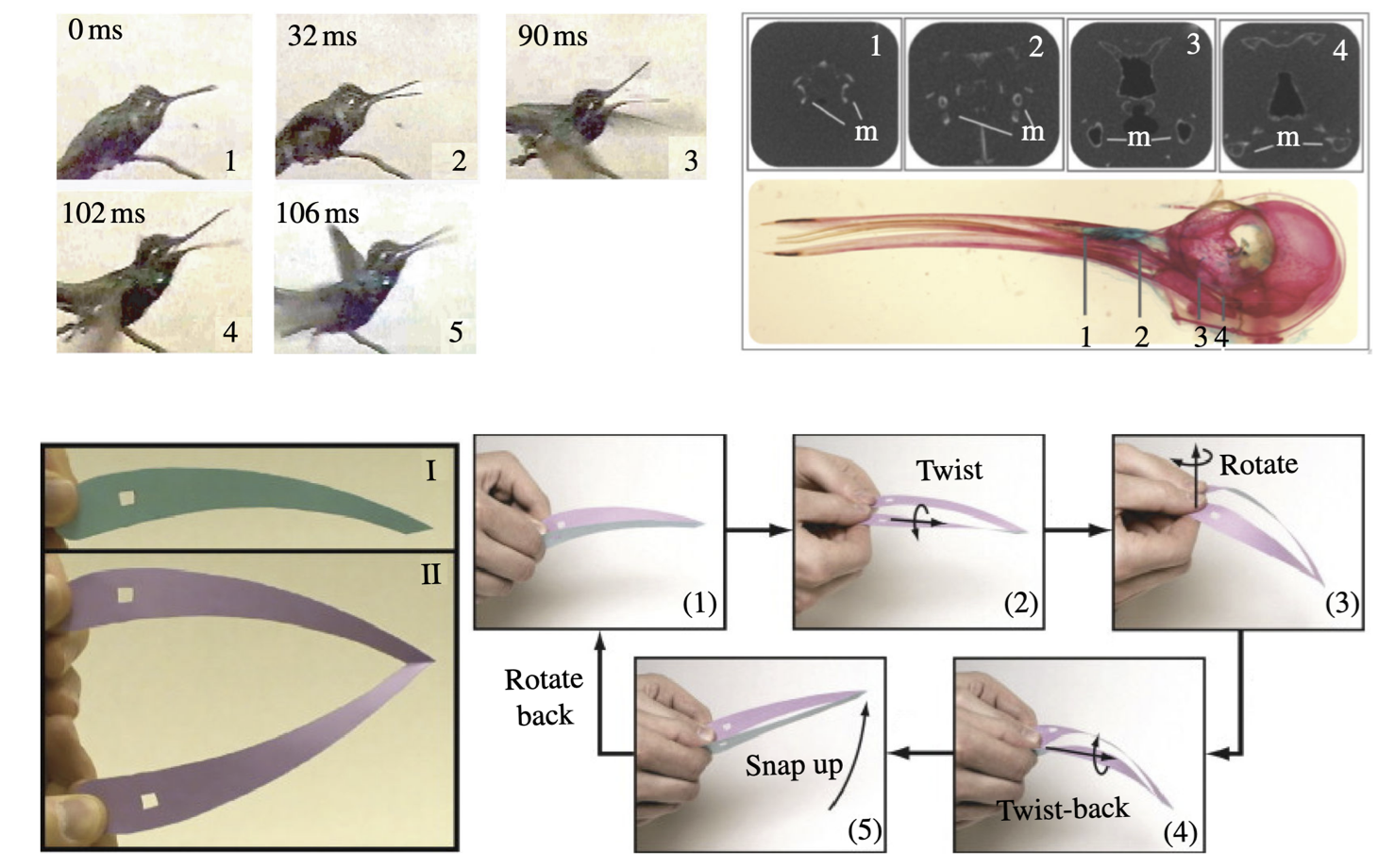
Nature often solves engineering problems in ways that are both elegant and efficient. A striking example can be found in the beak of the hummingbird. When a hummingbird captures an insect, its beak snaps shut with remarkable speed. What is fascinating about this motion is that it does not rely purely on muscular force. Instead, the geometry of the beak itself helps store and rapidly release elastic energy.
Our work explores how this natural mechanism can inspire new morphing structures in engineering. In particular, we investigate snap-through, a mechanical instability in which a structure suddenly transitions from one stable shape to another. Many people have experienced this behaviour when pressing on a rubber cap that suddenly everts. The motion appears instantaneous because the structure slowly stores elastic energy and then releases it all at once.
The central question of a recently published paper was: how much does the shape of the hummingbird inspired structure matter?
Using computational models, we systematically varied the geometry—such as curvature and cross-sectional shape—and observed how these changes affected the speed and intensity of the snap-through motion.
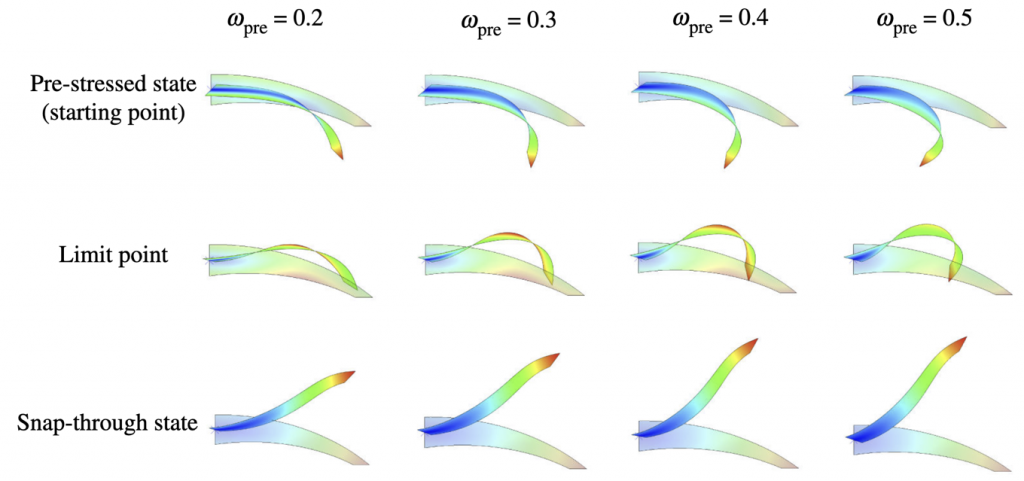
What emerges is a clear message: geometry is not just a detail—it is the mechanism. Small geometric changes can dramatically alter how much elastic energy is stored before instability occurs, and therefore how fast the structure moves when it snaps. Some geometries allow the structure to accumulate energy efficiently and release it in an extremely rapid motion.
Interestingly, the geometries that produce the most effective snap-through behaviour resemble the shapes we observe in real hummingbird beaks. This suggests that biological systems may naturally exploit these mechanical principles.
Why does this matter for engineering? Because snap-through offers a way to generate fast motion without large motors or complex mechanisms. By carefully designing geometry, we can create structures that move quickly, reliably, and efficiently. Such ideas could inform the design of soft robotic grippers, deployable aerospace structures, or rapid mechanical switches.
More broadly, the study illustrates a recurring theme in structural mechanics: performance often emerges not from stronger materials, but from the intelligent use of geometry and instability. When we learn how to harness these effects—many of which nature already uses—we can design structures that are both simpler and more capable.